 A use case: learning an efficient maize fertilization.
A use case: learning an efficient maize fertilization.
Abstract
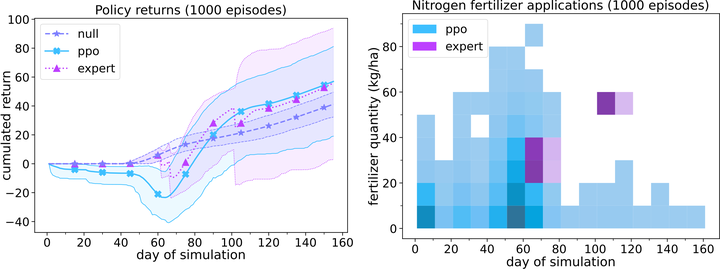
We introduce gym-DSSAT, a gym environment for crop management tasks, that is easy to use for training Reinforcement Learning (RL) agents. gym-DSSAT is based on DSSAT, a state-of-the-art mechanistic crop growth simulator. We modify DSSAT so that an external software agent can interact with it to control the actions performed in a crop field during a growing season. The RL environment provides predefined decision problems without having to manipulate the complex crop simulator. We report encouraging preliminary results on a use case of nitrogen fertilization for maize. This work opens up opportunities to explore new sustainable crop management strategies with RL, and provides RL researchers with an original set of challenging tasks to investigate.