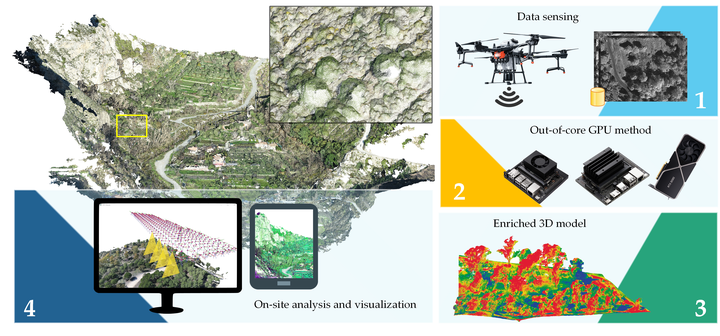
 Overview of the proposed solution.
Overview of the proposed solution.
Abstract
Image mapping on 3D huge scenarios of the real world is one of the most fundamental and computational expensive processes for the integration of multi-source sensing data. Recent studies focused on the observation and characterization of Earth have been enhanced by the proliferation of Unmanned Aerial Vehicle (UAV) and sensors able to capture massive datasets with a high spatial resolution. Despite the advances in manufacturing new cameras and versatile platforms, only a few methods have been developed to characterize the study area by fusing heterogeneous data such as thermal, multispectral or hyperspectral images with high-resolution 3D models. The main reason for this lack of solutions is the challenge to integrate multi-scale datasets and high computational efforts required for image mapping on dense and complex geometric models. In this paper, we propose an efficient pipeline for multi-source image mapping on huge 3D scenarios. Our GPU-based solution significantly reduces the run time and allows us to generate enriched 3D models on-site. The proposed method is out-of-core and it uses available resources of the GPU’s machine to perform two main tasks: (i) image mapping and (ii) occlusion testing. We deploy highly-optimized GPU-kernels for image mapping and detection of self-hidden geometry in the 3D model, as well as a GPU-based parallelization to manage the 3D model considering several spatial partitions according to the GPU capabilities. Our method has been tested on 3D scenarios with different point cloud densities (66M, 271M, 542M) and two sets of multispectral images collected by two drone flights. We focus on launching the proposed method on three platforms: (i) System on a Chip (SoC), (ii) a user-grade laptop and (iii) a PC. The results demonstrate the method’s capabilities in terms of performance and versatility to be computed by commodity hardware. Thus, taking advantage of GPUs, this method opens the door for embedded and edge computing devices for 3D image mapping on large-scale scenarios in near real-time.